
Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
HonorsAwardsScholarships
activity
Professional Activities
Reviewer
education
grant
Grants
- “Efficient coconut shell opening machine”, 201610589003, ¥10000, PI: Kuanqi Cai, funded by Ministry of Education of the People’s Republic of China (National Training Program of Innovation and Entrepreneurship for Undergraduates), 2016-2017.
portfolio
Portfolio item number 1
Short description of portfolio item number 1
Portfolio item number 2
Short description of portfolio item number 2
publications
Paper Title Number 1
Published in Journal 1, 2009
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1). http://academicpages.github.io/files/paper1.pdf
Paper Title Number 2
Published in Journal 1, 2010
This paper is about the number 2. The number 3 is left for future work.
Recommended citation: Your Name, You. (2010). "Paper Title Number 2." Journal 1. 1(2). http://academicpages.github.io/files/paper2.pdf
Paper Title Number 3
Published in Journal 1, 2015
This paper is about the number 3. The number 4 is left for future work.
Recommended citation: Your Name, You. (2015). "Paper Title Number 3." Journal 1. 1(3). http://academicpages.github.io/files/paper3.pdf
Publications
Published in , 1900
research
Research
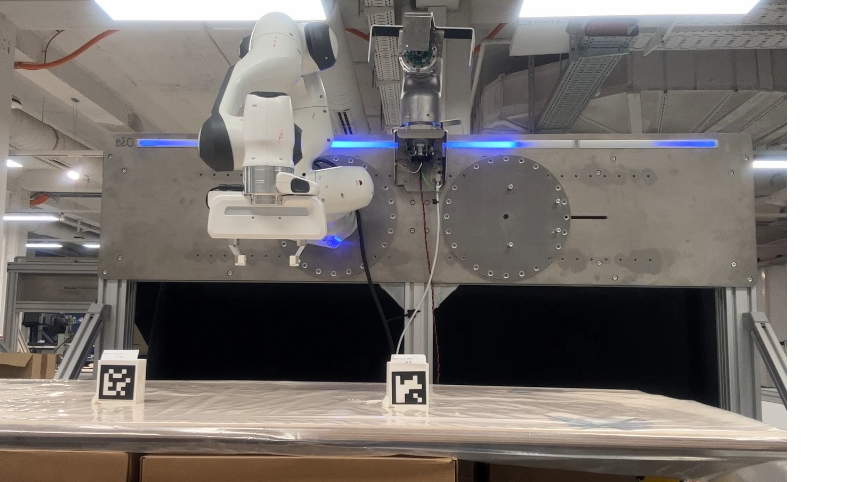
Reactive User-Guided Path Planning for Visual-Servoing Adaptation
2023-2024, TUM, Munich
Imitation learning promises to allow humans to teach robots tasks simply through demonstration. Traditional methods, relying on visual or kinesthetic teaching, have been limited to guiding robots along a single, static trajectory. This often results in the robot's end-effector colliding with objects, especially when navigating between start and goal poses. Our research introduces an innovative approach: visual servoing with online adaptation of key points and end-goals. This method enhances the robot's capability to handle dynamic tasks, such as moving objects, by allowing for multiple trajectories and supporting iterative learning through on-the-fly demonstrations. This adaptability is crucial in real-world applications where conditions and tasks can vary significantly. The main goal of our project is to develop an adaptive system for Learning by Demonstration (LbD) that is both user-friendly and capable of real-time, reactive planning based on user demonstrations. Our approach extends traditional LbD by incorporating real-time visual servoing, overcoming its limitations in adaptability and responsiveness. By enabling robots to learn from multiple demonstrations and adapt to changes in their environment, we aim to create a system that can handle a wide range of tasks, from moving cups to grasping objects on the move. This system will be equipped to deal with the unpredictability of real-world scenarios, including object movement and human intervention, making robots more flexible and accessible for everyday applications.talks
Talk 1 on Relevant Topic in Your Field
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Conference Proceeding talk 3 on Relevant Topic in Your Field
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.