
Posts by Collection
HonorsAwardsScholarships
activity
Professional Activities
Reviewer
education
grant
Grants
- “Efficient coconut shell opening machine”, 201610589003, ¥10000, PI: Kuanqi Cai, funded by Ministry of Education of the People’s Republic of China (National Training Program of Innovation and Entrepreneurship for Undergraduates), 2016-2017.
portfolio
Portfolio item number 1
Short description of portfolio item number 1
Portfolio item number 2
Short description of portfolio item number 2
publications
Paper Title Number 1
Published in Journal 1, 2009
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1). http://academicpages.github.io/files/paper1.pdf
Paper Title Number 2
Published in Journal 1, 2010
This paper is about the number 2. The number 3 is left for future work.
Recommended citation: Your Name, You. (2010). "Paper Title Number 2." Journal 1. 1(2). http://academicpages.github.io/files/paper2.pdf
Paper Title Number 3
Published in Journal 1, 2015
This paper is about the number 3. The number 4 is left for future work.
Recommended citation: Your Name, You. (2015). "Paper Title Number 3." Journal 1. 1(3). http://academicpages.github.io/files/paper3.pdf
Publications
Published in , 1900
research
Research
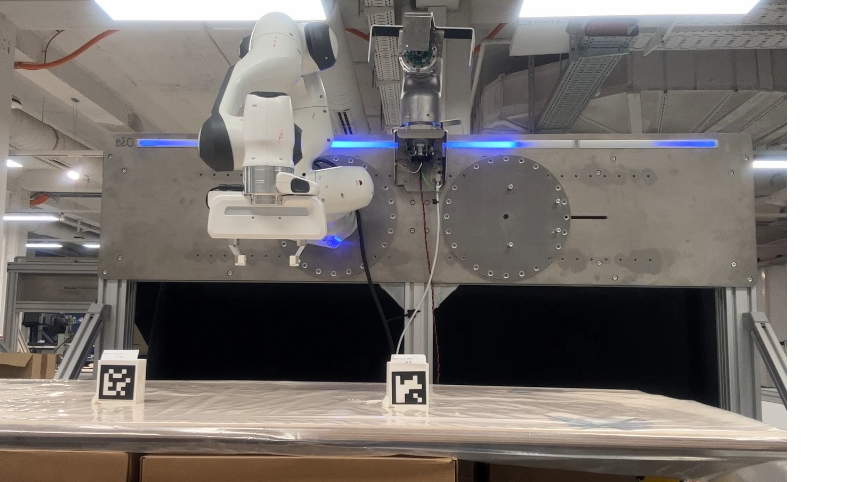
Reactive User-Guided Path Planning for Visual-Servoing Adaptation
2023-2024, TUM, Munich
Imitation learning promises to allow humans to teach robots tasks simply through demonstration. Traditional methods, relying on visual or kinesthetic teaching, have been limited to guiding robots along a single, static trajectory. This often results in the robot's end-effector colliding with objects, especially when navigating between start and goal poses. Our research introduces an innovative approach: visual servoing with online adaptation of key points and end-goals. This method enhances the robot's capability to handle dynamic tasks, such as moving objects, by allowing for multiple trajectories and supporting iterative learning through on-the-fly demonstrations. This adaptability is crucial in real-world applications where conditions and tasks can vary significantly. The main goal of our project is to develop an adaptive system for Learning by Demonstration (LbD) that is both user-friendly and capable of real-time, reactive planning based on user demonstrations. Our approach extends traditional LbD by incorporating real-time visual servoing, overcoming its limitations in adaptability and responsiveness. By enabling robots to learn from multiple demonstrations and adapt to changes in their environment, we aim to create a system that can handle a wide range of tasks, from moving cups to grasping objects on the move. This system will be equipped to deal with the unpredictability of real-world scenarios, including object movement and human intervention, making robots more flexible and accessible for everyday applications.talks
Talk 1 on Relevant Topic in Your Field
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Conference Proceeding talk 3 on Relevant Topic in Your Field
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.